Siga o Olhar Do dedo no Google Discover
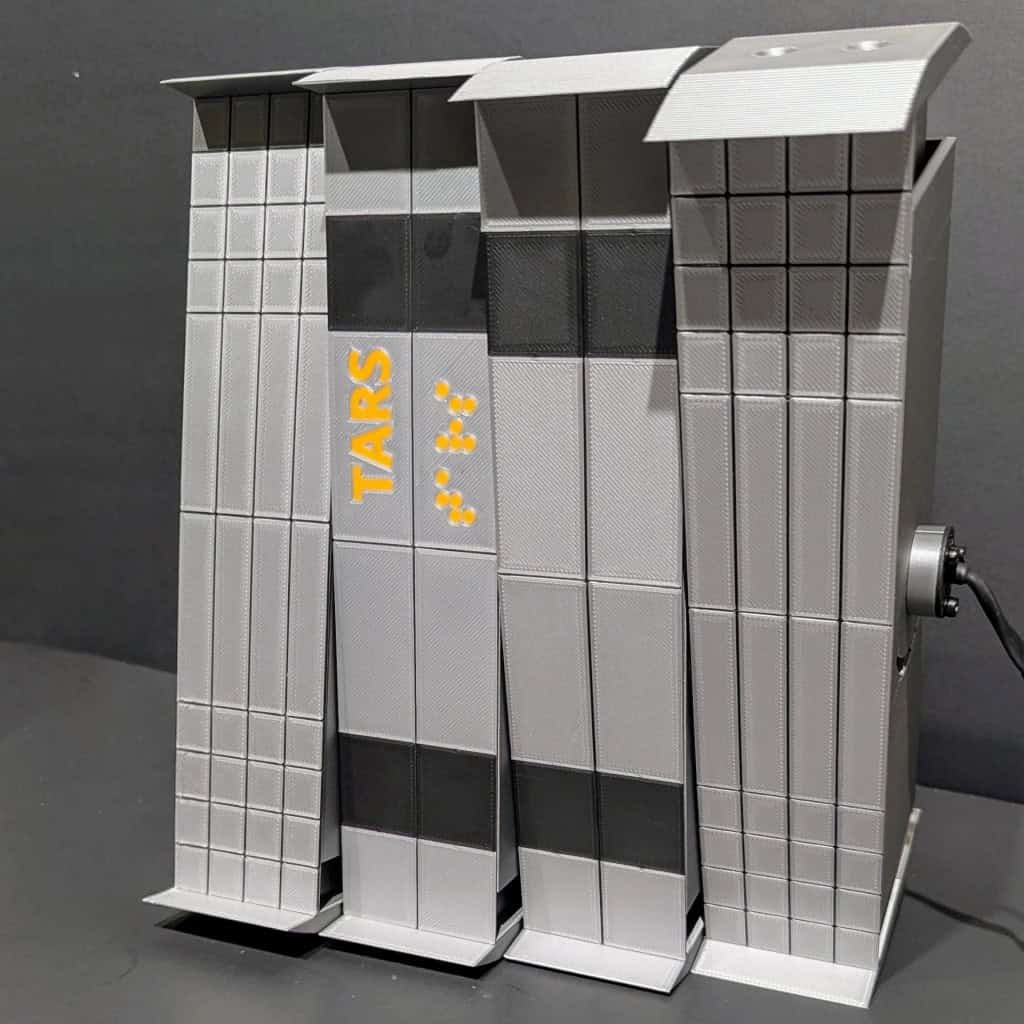
Cientistas criaram uma versão funcional, na vida real, do robô TARS do filme “Interestelar“. O robô, chamado TARS3D, foi desenvolvido por Aditya Sripada, engenheiro sênior em robótica na Nimble.ai, e seu colaborador de longa data, Abhishek Warrier.
Eles também assinam um cláusula chamado “Walking, Rolling, and Beyond: First-Principles and RL Locomotion on a TARS-Inspired Robot” (Caminhando, rolando e muito mais: princípios fundamentais e locomoção por tirocínio por reforço em um robô inspirado no TARS, em tradução livre), que foi finalista do prêmio Mike Stilman na 24ª conferência IEEE RAS Humanoids, em Seul (Coreia do Sul) — evento muito importante na pesquisa em robótica humanoide.
Uma vez que é o robô TARS3D e porquê ele se move
- No vídeo de prova, vê-se que o TARS3D tem quatro “pilares” telescópicos, cada um articulado de forma independente;
- A partir de uma visão lateral, dois pilares se rotacionam para frente e os outros dois para trás, formando um “X”;
- Esses pilares têm “pads” curvos nas extremidades superior e subalterno que funcionam porquê “pés” quando o robô anda. Mas, quando ele roda, esses “pads” se estendem para formar alguma coisa parecido com uma roda de oito raios — um tipo de roda sem aro;
- Sripada e Warrier afirmaram que esse é o primeiro robô inspirado no TARS que pode tanto marchar quanto rolar, o que é bastante significativo.
[embed]https://www.youtube.com/watch?v=_lxj-X5HDOQ[/embed]
Leia mais:
Motivações científicas e abordagem técnica
No cláusula técnico, os pesquisadores explicam que muitos robôs usam formas biomiméticas (imitando seres vivos), mas que muitas aplicações em ambientes criados pelo varão podem se beneficiar de formas não antropomórficas, ou seja, que não lembram corpos humanos.
Para controlar os movimentos, o TARS3D tem sete graus de liberdade: três articulações rotatórias e quatro prismáticas (as pernas telescópicas). Eles usaram tirocínio de máquina (machine learning), em privado deep reinforcement learning (DRL), junto com otimização, para desvendar modos de locomoção que não seriam fáceis de encontrar exclusivamente por métodos analíticos.
No cláusula, os autores relatam que usaram simulações com DRL e observaram que a política aprendida conseguia reproduzir os movimentos analíticos clássicos quando tinham os “priors” corretos, mas também descobriu comportamentos novos e inesperados.
Eles afirmam que a “morfologia biotranscendente” do TARS3D permite múltiplos modos de locomoção que antes não haviam sido explorados, abrindo caminhos promissores para robótica multimodal.
Atualmente, a versão do robô é conectada por cabo, o que limita a autonomia. Aliás, ele é bastante pequeno: mede muro de 25 cm de profundeza e pesa muro de 990 gramas, com todas as partes sendo impressas em 3D.
Apesar dessas limitações, os pesquisadores planejam testar o TARS3D em diferentes tipos de terreno para ver porquê ele se comporta fora de uma bancada de laboratório.
Motivação pessoal por trás da geração
Sripada contou, ao New Atlas, que começou a edificar o TARS3D em novembro de 2022, sem laboratório, sem financiamento e sem vínculo institucional — exclusivamente com noites e finais de semana dedicados ao projeto. Ele disse que se reconectou com “a simples alegria de edificar robôs”.
Ele descreveu a experiência porquê uma mistura de “maravilha, paciência, taboca quando alguma coisa lacuna e uma euforia silenciosa quando finalmente funciona”, e disse ainda que, “em qualquer momento do processo, você descobre uma pequena novidade verdade sobre movimento, persistência e sobre você mesmo”.